NeurIPS 2025 Oral
Adaptive Surrogate Gradients for SNNs
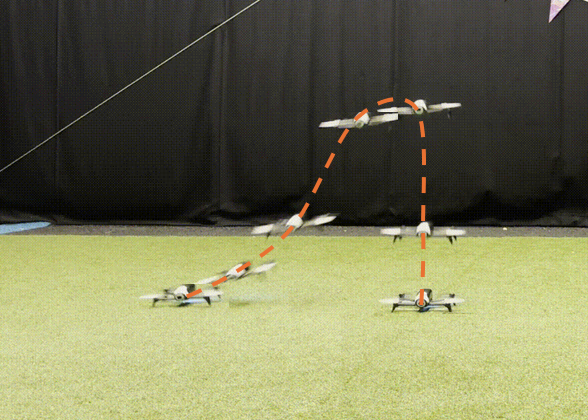
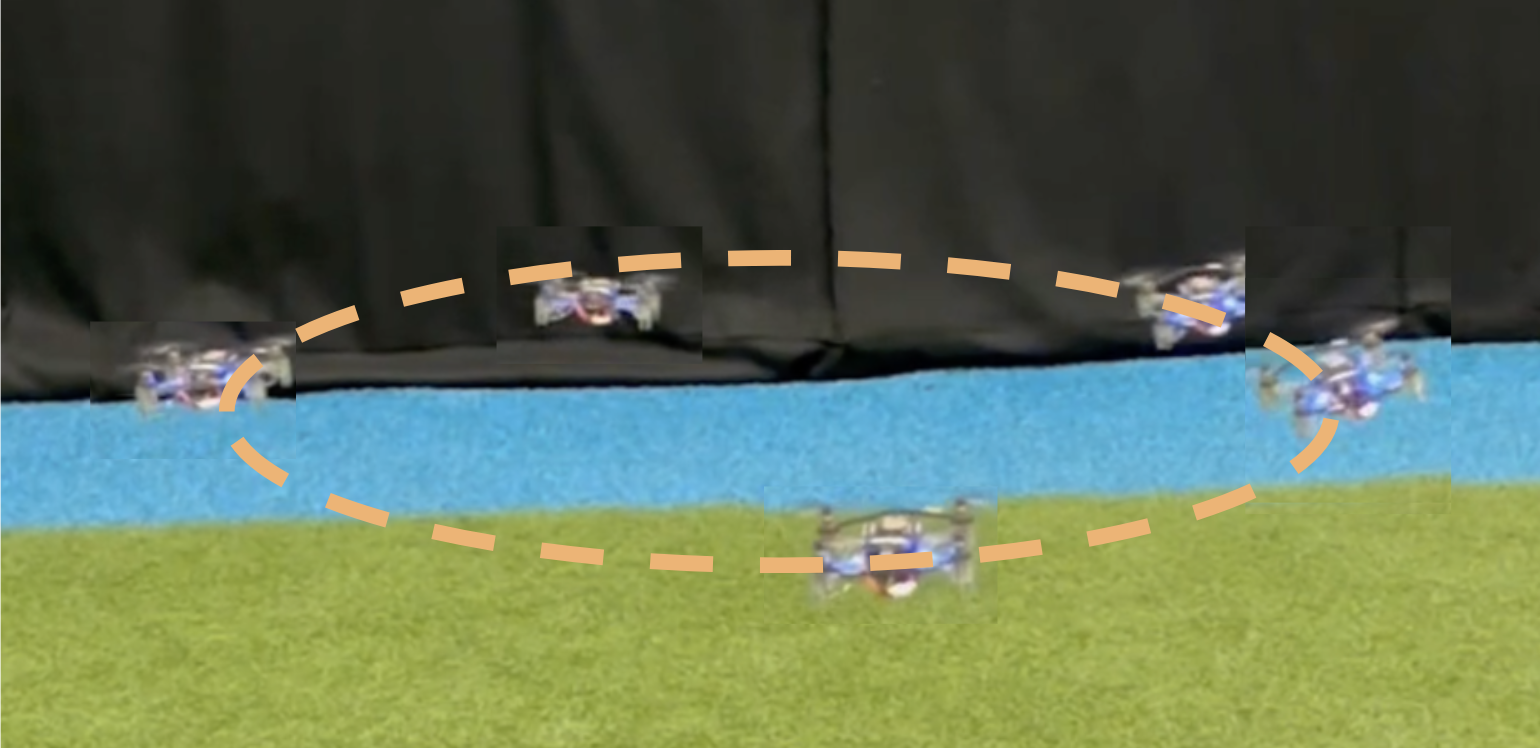
Training spiking neural networks for real-world drone control. Covers gradient scheduling, the warm-up period challenge, and zero-shot sim-to-real transfer.